6033590838
chainsight
6709
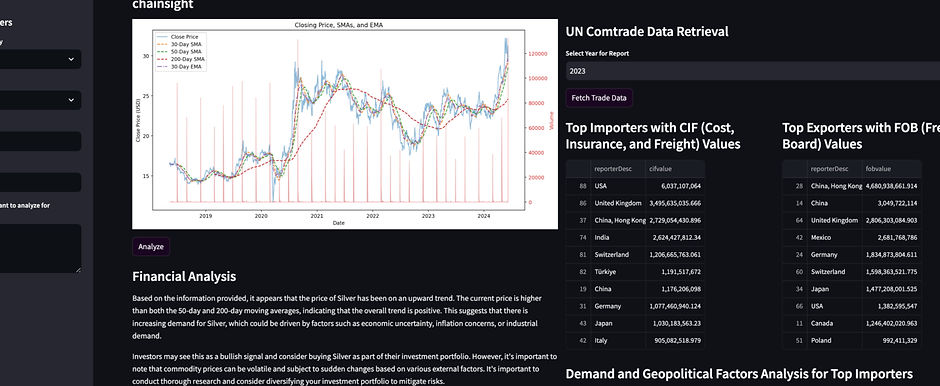
Conceptualized and developed "chainsight," an AI-powered platform to optimize commodity procurement analytics and supply chain management.
Engineered the software, integrating multiple data sources including OpenAI’s GPT, Yahoo Finance, and UN Comtrade APIs for robust financial and market analysis.
Designed a predictive model using linear regression to forecast commodity prices, significantly enhancing procurement decision-making.
Implemented comprehensive sentiment analysis and geopolitical factor evaluations, providing detailed insights that influence procurement strategies.
Directed the project from concept through to implementation, focusing on strategic integration and functionality tailored to procurement professionals.
UVM Aiken Engineering Challenge - 1st Place
November 2018 - February 2019
Designed and developed multiple iterations of a device capable of moving ping-pong balls to various elevated targets.
Received first place for the effectiveness of our device, competing against various high schools with multiple teams.
Managed the work schedule for each member of our small team, finding time to work on the device outside of scheduled class periods.

Joule's Apparatus
March 2019 - May 2019
Spent months personally researching and developing a real, working model of Joule’s apparatus.
Confirmed Joule’s constant, relating the amount of mechanical work to raise a certain mass of water by one degree.
Found creative solutions to problems, such as using household weights as the source of mechanical work.
Projectile Launcher
Work Sample: September 2019 - October 2019
The Problem
A company is looking for a 'regular-looking' object capable of launching a surveillance device 30 feet into the air.
Actions
We designed a spring-powered projectile launcher disguised as a cane. We developed numerous design iterations, both conceptual and physical before we landed on our final model.
Results
In the end, we created a 'cane' capable of shooting a 5-gram object to various This final model gave the company the capability of launching their surveillance device anywhere from 20 feet to 60 feet, allowing the company to conduct precise surveillance while adjusting the height themselves.
Autonomous Robot Dog
Work Sample: November 2019 - December 2019
The Problem
A company is looking for an autonomous, inconspicuous, dark-room surveillance device, capable of navigating a dark room and identifying possible intruders.
Actions
First, we decided that we were going to disguise our surveillance device as a dog, complete with fur, eyes, and a tail (the angle of the picture removed the tail from view). We then began to develop a C++ script that would give the robot commands based on different environmental inputs, from flex and light sensors. We tested the script extensively and developed many iterations until we landed on a program that solved the problem effectively.
Results
We created an autonomous surveillance robot 'dog' capable of tracking a light source in a dark room, navigating past obstacles along the way. The 'dog' wags its tail and plays a short tune when it identifies a possible intruder.
